Using BeagleConnect Greybus¶
Note
This is still in development.
BeagleConnect wireless user experience¶
Enable a Linux host with BeagleConnect¶
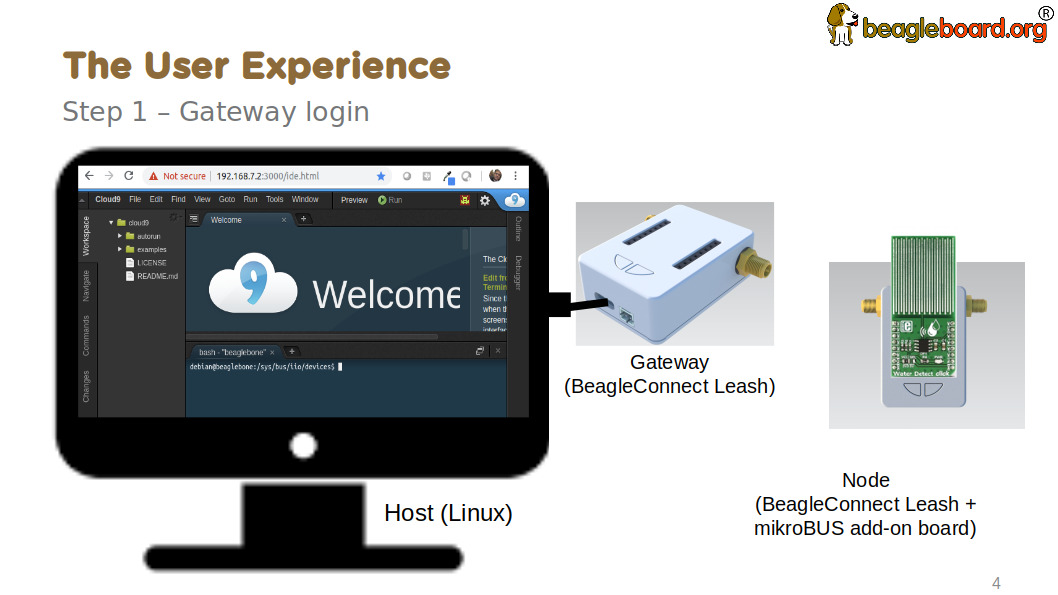
Log into a host system running Linux that is BeagleConnect™ enabled. Enable a Linux host with BeagleConnect™ by plugging a BeagleConnect™ gateway device into its USB port. You’ll also want to have a BeagleConnect™ node device with a sensor, actuator or indicator device connected.
Note
BeagleConnect™ Freedom can act as either a BeagleConnect™ gateway device or a BeagleConnect™ node device.
Important
The Linux host will need to run the BeagleConnect™ management software, most of which is incorporated into the Linux kernel. Support will be provided for BeagleBoard and BeagleBone boards, x86 hosts, and Raspberry Pi.
#TODO#: Clean up images
Connect host and device¶
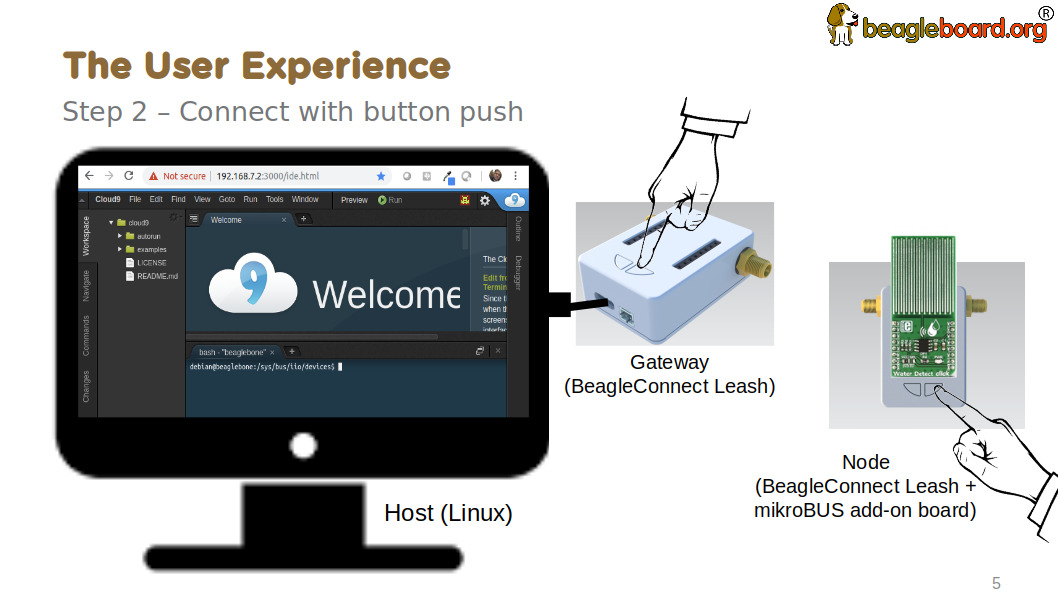
Initiate a connection between the host and devices by pressing the discovery button(s).
Device data shows up as files¶
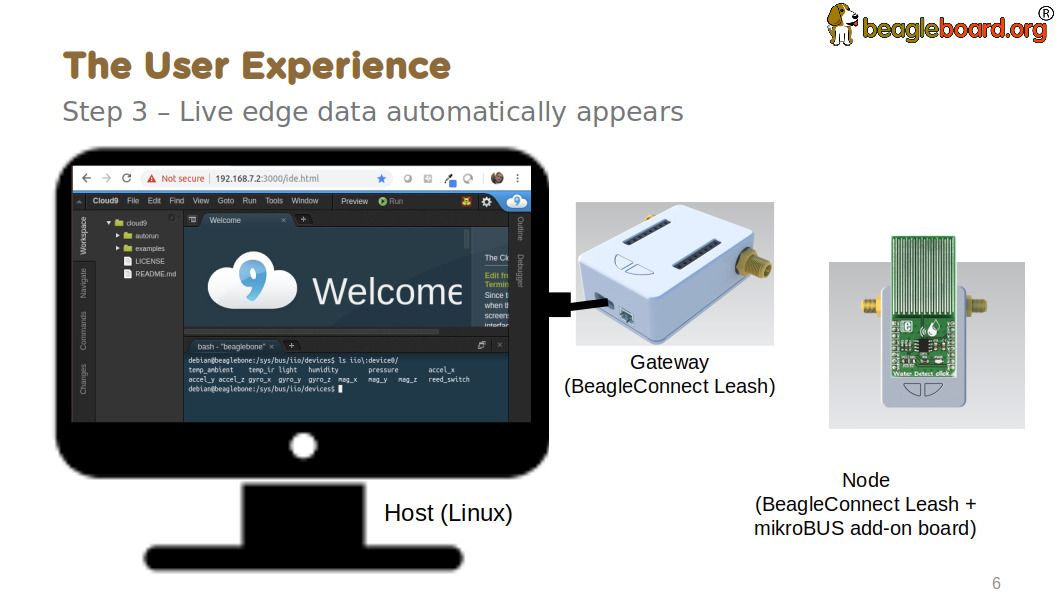
New streams of self-describing data show up on the host system using native device drivers.
High-level applications, like Node-RED, can directly read/write these high-level data streams (including data-type information) to Internet-based MQTT brokers, live dashboards, or other logical operations without requiring any sensor-specific coding. Business logic can be applied using simple if-this-then-that style operations or be made as complex as desired using virtually any programming language or environment.
Components¶
BeagleConnect™ enabled host Linux computer, possibly single-board computer (SBC), with BeagleConnect™ management software and BeagleConnect™ gateway function. BeagleConnect™ gateway function can be provided by a BeagleConnect™ compatible interface or by connecting a BeagleConnect™ gateway device over USB.
Note
If the Linux host has BLE, the BeagleConnect™ gateway is optional for short distances
BeagleConnect™ Freedom Board, case, and wireless MCU with Zephyr based firmware for acting as either a BeagleConnect™ gateway device or BeagleConnect™ node device.
In BeagleConnect™ gateway device mode: Provides long-range, low-power wireless communications, Connects with the host via USB and an associated Linux kernel driver, and is powered by the USB connector.
In BeagleConnect™ node device mode: Powered by a battery or USB connector Provides 2 mikroBUS connectors for connecting any of hundreds of Click Board mikroBUS add-on devices Provides new Linux host controllers for SPI, I2C, UART, PWM, ADC, and GPIO with interrupts via Greybus
BeagleConnect gateway device¶
Provides a BeagleConnect™ compatible interface to a host. This could be a built-in interface device or one connected over USB. BeagleConnect™ Freedom can provide this function.
BeagleConnect node device¶
Utilizes a BeagleConnect™ compatible interface and TODO
BeagleConnect compatible interface¶
Immediate plans are to support Bluetooth Low Energy (BLE), 2.4GHz IEEE 802.15.4, and Sub-GHz IEEE 802.15.4 wireless interfaces. A built-in BLE interface is suitable for this at short range, whereas IEEE 802.15.4 is typically significantly better at long ranges. Other wired interfaces, such as CAN and RS-485, are being considered for future BeagleConnect™ gateway device and BeagleConnect™ node device designs.
Greybus¶
TODO
#TODO: Find a place for the following notes:
The device interfaces get exposed to the host via Greybus BRIDGED_PHY protocol
The I2C bus is probed for a an identifier EEPROM and appropriate device drivers are loaded on the host
Unsupported Click Boards connected are exposed via userspace drivers on the host for development
What’s different?¶
So, in summary, what is so different with this approach?
No microcontroller code development is required by users
Userspace drivers make rapid prototyping really easy
Kernel drivers makes the support code collaborative parts of the Linux kernel, rather than cut-and-paste